
直线振动筛单颗粒物料虚拟样机试验设置
作者:宏源科技 日期:2013-12-20
对直线振动筛的筛分效率有重要影响的是物料在筛分装置中的运动情况,因此,针对筛分装置中物料的透筛情况的研究也就成为直线振动筛研究的一个重要方面。其实际意义体现在,无论是对现有的筛分装置的改进,还是研制新型高效筛分设备,都有赖于对透筛过程的深入研究。
以往的一些学者对于振动筛上物料颗粒透筛情况的研究主要是在实验的基础上进行的[24,41],这样可以增加研究的真实性,但是对硬件设备和各种检测仪器的要求比较高,需要有振动筛的实验平台、高速摄像机、高质量的传感器等。同时,在通过实际的筛分设备进行研究时,筛分过程将会受许多不确定性因素的影响,实验过程存在较大的随机性,最终导致所得到的实验结果真实性低,可使用的价值不高。本文针对实验研究的上述弊端,采用虚拟样机技术,对物料在某型全断面道碴清筛机的直线振动筛中的透筛情况进行仿真。基于上一章中所建立起来的直线振动筛虚拟样机模型,通过使虚拟样机模型中的振幅J、振动频率/、筛面倾角a和振动方向角J四个变量依次分别发生变化或者同时变化,得到单颗粒物料的透筛时间及物料透筛时的位置,进而分析所选定的四个工作参数对物料透筛的影响情况。
单颗粒物料虚拟样机试验设置
以往的一些学者对于振动筛上物料颗粒透筛情况的研究主要是在实验的基础上进行的[24,41],这样可以增加研究的真实性,但是对硬件设备和各种检测仪器的要求比较高,需要有振动筛的实验平台、高速摄像机、高质量的传感器等。同时,在通过实际的筛分设备进行研究时,筛分过程将会受许多不确定性因素的影响,实验过程存在较大的随机性,最终导致所得到的实验结果真实性低,可使用的价值不高。本文针对实验研究的上述弊端,采用虚拟样机技术,对物料在某型全断面道碴清筛机的直线振动筛中的透筛情况进行仿真。基于上一章中所建立起来的直线振动筛虚拟样机模型,通过使虚拟样机模型中的振幅J、振动频率/、筛面倾角a和振动方向角J四个变量依次分别发生变化或者同时变化,得到单颗粒物料的透筛时间及物料透筛时的位置,进而分析所选定的四个工作参数对物料透筛的影响情况。
单颗粒物料虚拟样机试验设置
在直线振动筛虚拟样机的仿真试验中,为了得到每个参数单独变化及多个参数同时变化时,单颗粒物料的透筛时间和下落的位置,需要进一步对虚拟样机模型进行以下设置:
1.上一章中,考虑到要进行多颗粒物料透筛情况的研究,在建立虚拟样机的模型时,颗粒一共有九颗。在进行单颗粒物料透筛情况研究时,其中的八颗不参与仿真,需要进行以下设置:单击菜单[Edit]—[Deactivate],弹出Database Navigator对话框,在其中选择ball2?ball9,使得表征物料颗粒的九个球中,只有balll是有效的。经过此操作之后,ADAMS软件会自动的将与balll无关的接触及其他参数设定为Deactivate,不会影响单颗粒物料透筛情况的研究;
2.为了得到物料的透筛时间,需要在振动筛虚拟样机模型中建立一个Sensor,其作用是当物料透过筛面时,使仿真过程停止并显示出物料透筛的时间。振动筛筛面所在的位置为>^=0,所以,物料透筛的条件是切,即当物料颗粒质心位置的竖直方向分量小于等于0时认为物料透筛[”’12]。ADAMS软件检测到物料透筛后自动停止仿真过程,激发条件是:DY (.duokelixinshaizi.balll.MARKER_26,.duokelixinshaizi.PART2.MARKER__29,.duokelixinshaizi.PART2.MARKER_29) <0,动作的结果选择为停止当前仿真。Sensor设置的对话框如图4.1所示;
1.上一章中,考虑到要进行多颗粒物料透筛情况的研究,在建立虚拟样机的模型时,颗粒一共有九颗。在进行单颗粒物料透筛情况研究时,其中的八颗不参与仿真,需要进行以下设置:单击菜单[Edit]—[Deactivate],弹出Database Navigator对话框,在其中选择ball2?ball9,使得表征物料颗粒的九个球中,只有balll是有效的。经过此操作之后,ADAMS软件会自动的将与balll无关的接触及其他参数设定为Deactivate,不会影响单颗粒物料透筛情况的研究;
2.为了得到物料的透筛时间,需要在振动筛虚拟样机模型中建立一个Sensor,其作用是当物料透过筛面时,使仿真过程停止并显示出物料透筛的时间。振动筛筛面所在的位置为>^=0,所以,物料透筛的条件是切,即当物料颗粒质心位置的竖直方向分量小于等于0时认为物料透筛[”’12]。ADAMS软件检测到物料透筛后自动停止仿真过程,激发条件是:DY (.duokelixinshaizi.balll.MARKER_26,.duokelixinshaizi.PART2.MARKER__29,.duokelixinshaizi.PART2.MARKER_29) <0,动作的结果选择为停止当前仿真。Sensor设置的对话框如图4.1所示;
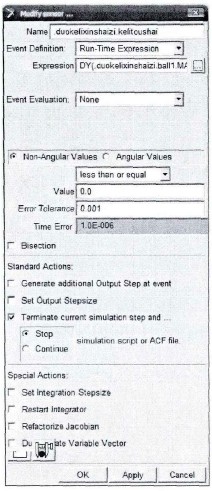
图4.1 Sensor设置
3.为了得到物料的下落位置,需要建立六个Measure,分别对物料仿真过程中三个方向的位移和加速度进行监测。对颗粒X方向位移进行监测的Measure命名为ball l_x_displacement ;对颗粒方向位移进行监测的Measure命名为ball l_y_displacement ;对颗粒z方向位移进行监测的Measure命名为ball 1 _2_displacement ;对颗粒x方向加速度进行监测的Measure命名为ball 1 _x_accelerate ;对颗粒方向加速度进行监测的Measure命名为ball 1 一y—accelerate ;对颗粒z方向加速度进行监测的Measure命名为ball 1 _z_accelerateo其中对颗粒x方向位移监测和加速度监测的Measure的设置如图4.2所示。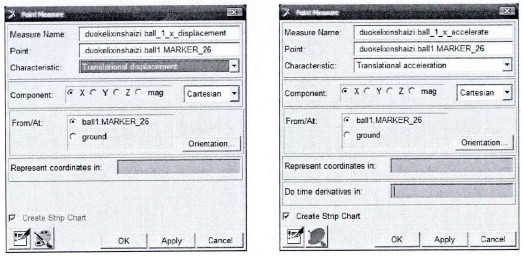
图 4.2 Measure 设置
至此,单颗粒物料仿真所需的虚拟样机模型已经建立并设置完成,如图4.3所示。
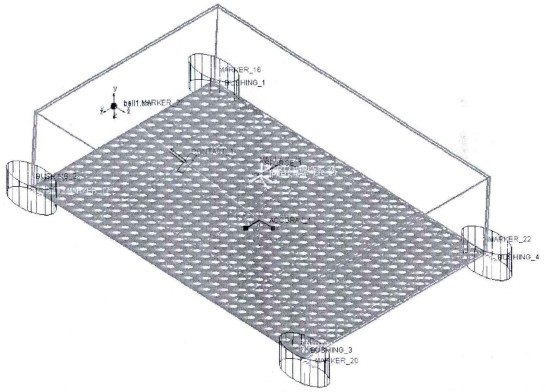
图4.3单颗粒仿真试验模型
本文关键词:








